
Kollaboration bedeutet Zusammenarbeit. Wie stark diese zwischen Mensch und Roboter ausgeprägt ist, lässt sich in vier verschiedene Stufen einteilen: Die räumliche Abtrennung, die Koexistenz, die Kooperation und schließlich die Kollaboration. Hier erfahren Sie, inwiefern sich diese in ihren Anwendungsbereichen unterscheiden und welche Rolle Taktgeschwindigkeit und Sicherheit dabei spielen.
Vier Arten der Zusammenarbeit
Dass der Roboter den Menschen maßgeblich bei seiner Arbeit unterstützt und den Produktionsprozess dabei sowohl effizienter als auch sinnvoller gestalten kann, ist bekannt. Wie stark die beiden in der Produktion tatsächlich zusammenarbeiten, ist allerdings von Anwendung zu Anwendung unterschiedlich. Derselbe Roboter kann also, ähnlich einem herkömmlichen Industrieroboter, selbstständig und ohne Kontakt zum Menschen seine Arbeit verrichten. Ein Roboter kann aber auch so intensiv mit dem Menschen zusammenarbeiten, dass er dessen dritter Hand gleicht. Grundsätzlich wird in folgende vier Abstufungen der Kollaboration mit Cobots unterschieden:

1. Die räumliche Abtrennung: Hier arbeitet der Roboter durch einen Schutzzaun abgetrennt und selbstständig. Eine Zusammenarbeit mit dem Menschen ist somit nicht gegeben. Eine Person darf nur dann am Roboter Hand anlegen, nachdem dieser zum absoluten Stillstand gebracht wurde.
2. Die Koexistenz: Auch hier benötigt der Roboter keinen Menschen, der ihm Einzelteile oder Ähnliches reicht. Allerdings befindet er sich anders als in der ersten Abstufung nicht mehr innerhalb eines Schutzzaunes. Ein Grund dafür könnte sein, dass sich ein Gang direkt neben dem Roboter befindet, der frei bleiben muss. Um die Sicherheit trotzdem zu gewährleisten, kann dieser Schutz- oder Sicherheitsbereich beispielsweise mit einem Sicherheitsflächenscanner abgesichert werden.
3. Die Kooperation: Bei der Kooperation kommt schließlich der Mensch ins Spiel. Hier liegt die Aufgabe des Roboters beispielsweise darin, eine Maschine zu bestücken, während eine Mitarbeiterin oder ein Mitarbeiter diesen laufend mit Teilen zum einlegen versorgt.
4. Die Kollaboration: Wenn von Kollaboration die Rede ist, spricht man von einem wahrhaftig eingespielten Team aus Mensch und Roboter. Die beiden stehen bei ihrer Arbeit also in engem Kontakt und bewegen sich im Bewegungsfeld des jeweils anderen. Man könnte sich zum Beispiel vorstellen, wie Mitarbeitende Schrauben einlegen, die der kollaborierende Roboter direkt im Anschluss festzieht.
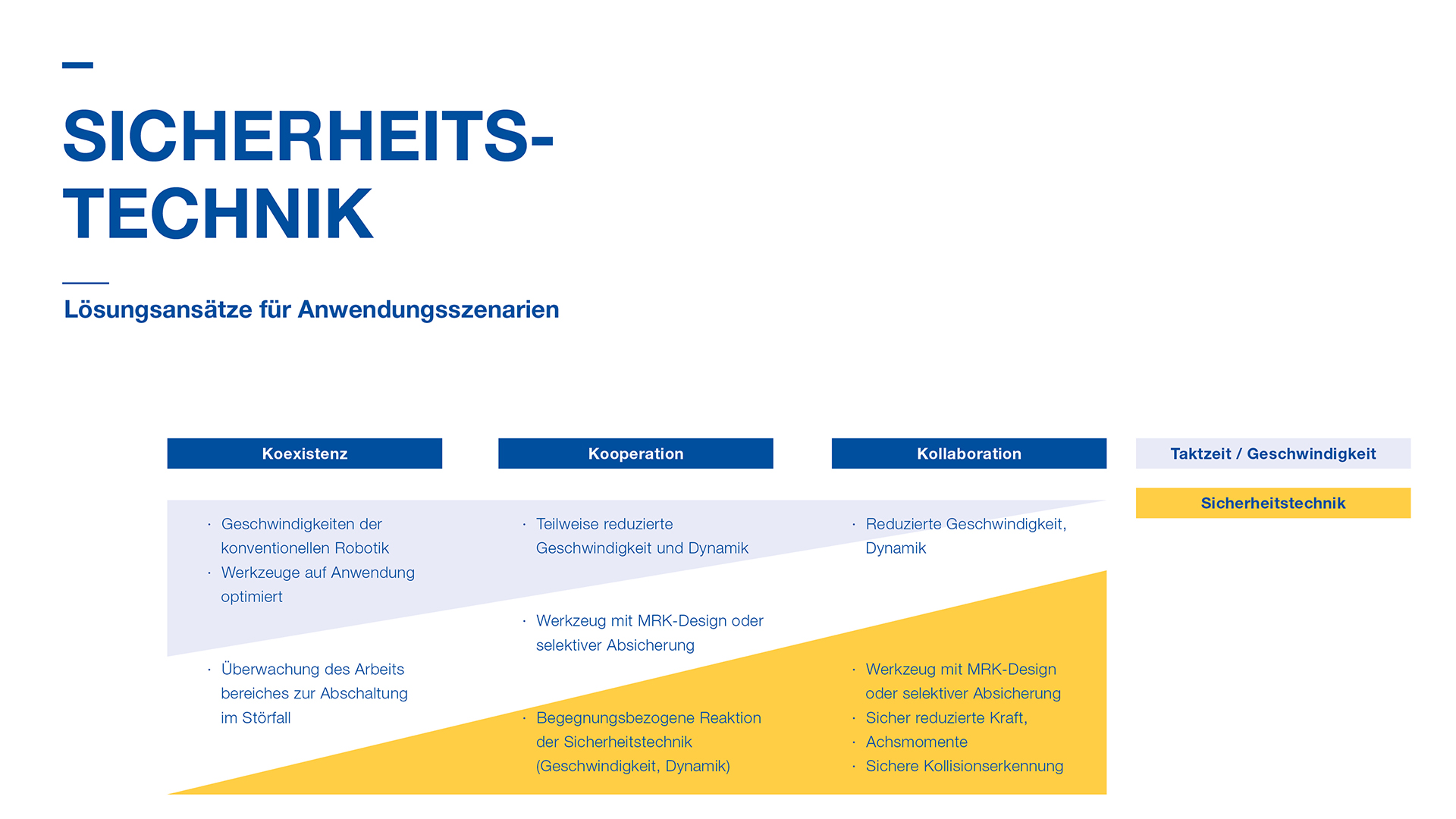
Es kommt auf den Takt an – und auf die Sicherheit
Roboter führen in der Regel monotone Tätigkeiten aus, mit denen sie den Menschen entlasten. Die Zeit zwischen Beginn und Ende des Vorganges, den der Roboter stets wiederholt, wird als Taktzeit bezeichnet. Mit welcher Geschwindigkeit ein Takt ausgeführt wird, nennt man folglich Taktgeschwindigkeit. Je stärker der Roboter mit dem Menschen zusammenarbeitet, desto langsamer wird die Taktgeschwindigkeit. Damit wird sichergestellt, dass der Mensch nicht verletzt wird. Befindet sich der Roboter nämlich in einem gänzlich abgegrenzten Bereich, kann er sehr schnell arbeiten, da dadurch ohnehin keine Gefahr für den Menschen besteht. Arbeitet er allerdings auf Grund einer ausgeprägten Kollaboration eng mit dem Menschen zusammen, muss er sich langsamer bewegen, da ansonsten schnell Unfälle passieren könnten. Je höher der Grad der Kollaboration, desto strenger müssen auch die Sicherheitsvorkehrungen ausgelegt werden.
Unbegründete Hemmungen
Es gilt also je nach Applikation zu entscheiden, inwiefern eine enge Kollaboration zwischen Mensch und Roboter sinnvoll ist. Während diese in manchen Fällen dem Prozess durch die sicherheitstechnisch notwendige Verlangsamung schaden könnte, entlastet sie Arbeitende in anderen Bereichen stark. Hemmungen in Bezug auf nahen Kontakt mit kollaborierenden Robotern sind nach wie vor weit verbreitet – dabei erweisen sich diese als unbegründet. Eine reduzierte Taktgeschwindigkeit stellt nicht bei jeder Anwendung einen Nachteil dar. Stattdessen sind kollaborative Anwendungen stark im Wachstum und dürften die Zukunft prägen.
