
Das Angebot an Greifern sowie Endeffektoren ist vielfältig. So vielfältig, dass man schnell auch mal den Überblick verliert. Ist man aber erstmal in der Lage, die verschiedenen Anwendungsbereiche der Werkzeuge zu unterscheiden, kommt Licht ins Dunkel. Wir klären über die verschiedenen Bereiche auf und unterstützen Sie bei der richtigen Wahl.
Die Top 3 Anwendungsfelder für Greifer und Endeffektoren Ihres Cobots
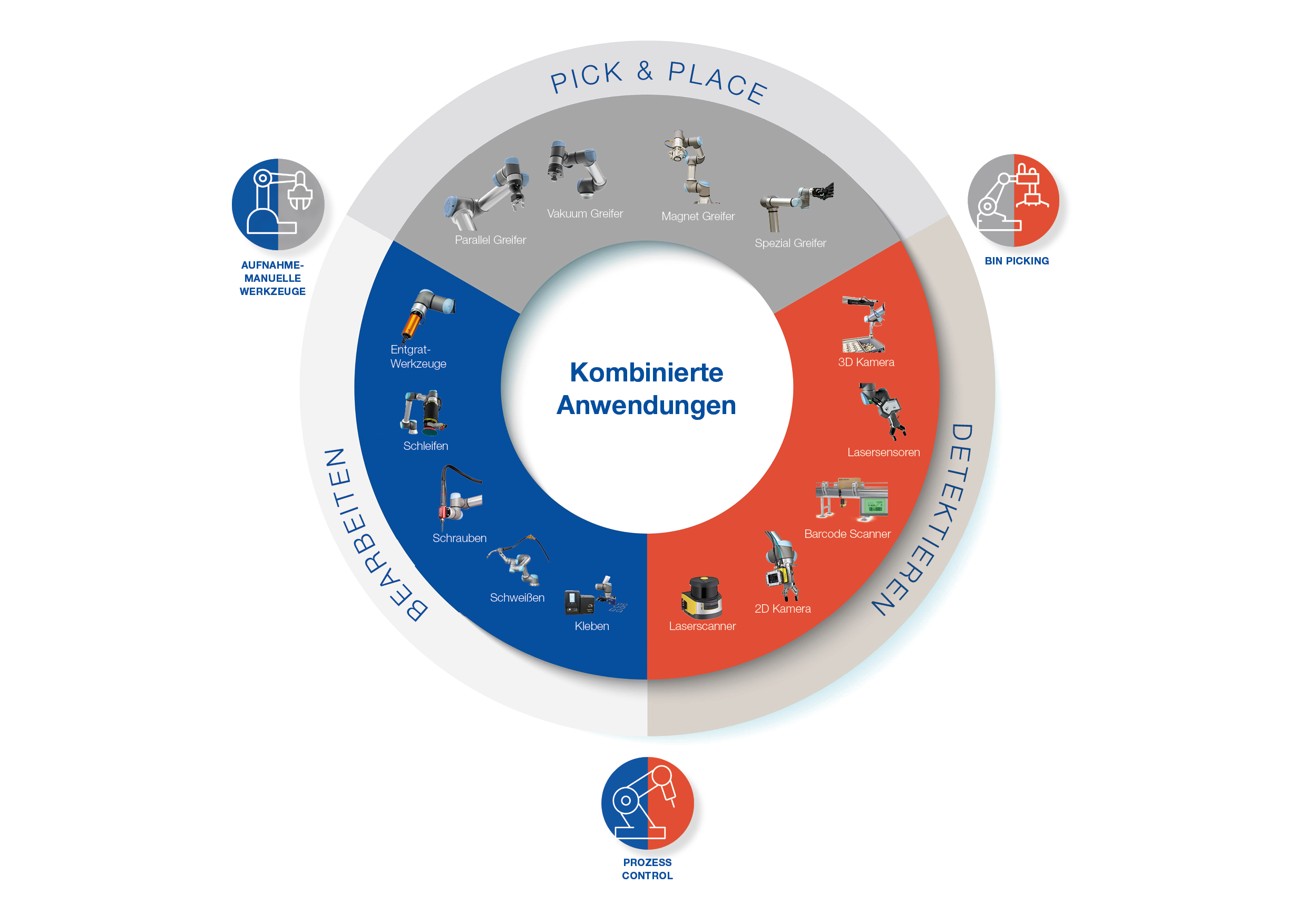
1. Pick and Place
Eine besonders häufige Anwendung, bei der Greifer verwendet werden, trägt den Namen „Pick and Place”. Wie dieser schon erahnen lässt, geht es dabei darum, Werkstücke anzuheben, um sie an einer anderen Stelle wieder abzulegen.
2. Bearbeiten
Das Bearbeiten stellt das Spezialgebiet der Endeffektoren dar. Im Gegensatz zum Anwendungsfeld „Pick and Place”, kommen hier gewisse Manipulationen am Werkstück ins Spiel. Es geht folglich nicht mehr darum, das Bauteil zu transportieren, sondern es wird durch einen bestimmten Vorgang bearbeitet.
3. Detektieren
Beim Detektieren arbeitet der Cobot mit einer Kamera zusammen. Dadurch wird automatisch eine Vielzahl an Anwendungen möglich, wie zum Beispiel das Scannen von Barcodes oder Qualitätskontrollen.
 Pick and Place: Ein ständiges Auf und Ab
Pick and Place: Ein ständiges Auf und Ab
Parallelgreifer könnte man als Klassiker zur Ausführung von Pick and Place Aufgaben bezeichnen. Durch die Greiferbacken, die parallel zueinander stehen, wird der Hub linear ausgeführt. Das bedeutet, dass der Roboter den Parallelgreifer senkrecht auf das Werkstück zuführt, woraufhin dieses aufgegriffen wird. Häufig sind diese auch mit integrierten Wegmesssystemen sowie Möglichkeiten der Kraftmessung ausgestattet. Dadurch sind die Greifer auch bei Teilen flexibel einsetzbar, die weniger Kraft aushalten. Zudem besteht die Möglichkeit neben elektrischen Parallelgreifern, pneumatische Alternativen einzusetzen.
Während das Bauteil beim Parallelgreifer eingeklemmt wird, saugt der Vakuumgreifer dieses an. Dies geschieht mittels Unterdruck, woraufhin die auf den Seiten angebrachten Saugnäpfe das Teil festhalten. Die dafür notwendigen Vakuumpumpen lassen sich elegant in die Applikation integrieren. Sie müssen lediglich angeschlossen werden, woraufhin der Prozess bereits starten kann. Diese Anwendung ist in gewissen Fällen beim Bin Picking vorteilhaft, da man nicht darauf angewiesen ist, die Einzelteile an den Seiten anzupacken. Stattdessen werden sie einfach angesaugt. Ebenfalls findet diese Anwendung beim Schlichten von Kartonschachteln Verwendung. Dies können Sie sich in unserem How-to-Video zum Thema Palettierung anschauen.
Ähnlich wie Vakuumgreifer funktionieren Magnetgreifer. Diese sind allerdings bezüglich der Materialien auf Stahlteile oder Bleche beschränkt. Allerdings üben sie eine viel stärkere Hubkraft auf eine kleine Fläche aus als ein vergleichbarer Vakuumgreifer.
Schließlich kommen wir zu den Spezialgreifern. Diese stellen häufig anatomische Nachbildungen von menschlichen Fingern oder Händen dar. Sie sind dadurch sehr sensibel und in der Lage, sich dem Teil anzuschmiegen. Auch wenn ihre Hubkraft im Vergleich zu anderen Greifern gering ist, können sie auch geometrisch undefinierbare Teile aufnehmen.
Bearbeiten: Vielfältige Möglichkeiten
Im Bereich des Bearbeitens gibt es eine große Anzahl an Endeffektoren, die für spezifische Anwendungen konzipiert wurden. Wenn es um das Kleben und Lackieren geht, kommen sowohl Silikonspritzen zum Auftragen einer Kleberaupe als auch Sprühdüsen zum Auftragen des Klebers oder Lackes in Frage. Diese Lackierung könnte in einem nächsten Schritt beispielsweise durch eine Schleifscheibe angeschliffen und poliert werden.
Auch zum Entgraten gibt es spezielle Werkzeuge, die am Arm des Roboters montiert werden. Dabei wird der Grat, der nach der Bearbeitung eines Teiles am Metall zurückbleibt, entfernt. So wird verhindert, dass man sich an den scharfen Kanten schneiden oder anderweitig verletzen kann.
Beim Schweißen ist der Einsatz einer kollaborierenden Schweißzelle möglich, während auch das Schrauben eine häufige Applikation darstellt. Dabei stellt die Wahl des passenden Werkzeuges oft eine größere Herausforderung dar, da Faktoren wie der Schraubenkopf oder das Drehmoment berücksichtigt werden müssen.
Detektieren: Beobachten, erkennen und kontrollieren
Das Detektieren hat bis zu einem gewissen Grad immer etwas mit der optischen Bildverarbeitung zu tun. So werden sowohl 2D- als auch 3D-Kameras eingesetzt. Erstere können zum Beispiel Teile erkennen, die wild durcheinander von einem Förderband transportiert werden und diese daraufhin korrekt aufnehmen. 3D-Kameras erfreuen sich beim Bin Picking großer Beliebtheit. Den hochauflösenden Kameras ist es möglich, Teile in allen drei Dimensionen zu vermessen. Zum Vermessen sind auch Laserscanner gut geeignet. Diese können dies zwar nur in einer Dimension, dafür aber besonders genau.
Ebenso das Lesen von Barcodes fällt unter diese Kategorie. Dies ist beispielsweise beim Sortieren von Schachteln anhand der Codes nützlich. Mehr über dieses Thema finden Sie in unserem Artikel „Laser vs. Kamera: Identifikationssysteme im Vergleich”.
Schließlich können Lichtschranken die Anwesenheit von Teilen kontrollieren. Dafür werden diese entweder direkt am Roboter oder alternativ an einer festen Stelle montiert. Mehr dazu verrät Ihnen unser Artikel „Wie Sie wissen, wann robotergesteuerte Vision Systeme sinnvoll sind”.
Better together
Viele Anwendungen lassen sich mit den einzelnen, oben genannten Komponenten lösen. Komplexere Aufgaben fordern allerdings die Kombination unterschiedlicher Methoden. Eine klassische Kombination aus den Anwendungsfeldern „Pick and Place” und „Detektieren” stellt das Bin-Picking dar. Genaueres über diese Anwendung lesen Sie im Artikel: „Wie Sie Bin-Picking mit Cobots in Ihre Produktion integrieren”.
Unter dem Begriff „In-process-control” fällt zum Beispiel eine Anwendung, bei der ein Laserscanner oder eine 3D-Kamera während des Schweißprozesses den Verlauf der Schweißnaht vermisst und den Roboter dementsprechend entlang führt. Der Roboter kann seinen Weg also während er arbeitet verändern. Ansonsten ist es üblich, den Weg des Roboters vorweg zu programmieren. Diese flexible Anwendung kann als Schnittmenge zwischen den Feldern „Bearbeiten” und „Detektion” betrachtet werden.
Zwischen „Pick and Place” und „Bearbeiten” tut sich schließlich noch der Bereich der manuellen Werkzeuge auf. Auch wenn diese Anwendung sehr selten und in wenigen Fällen sinnvoll ist, besteht die Möglichkeit, ein Werkzeug, das auch zur manuellen Arbeit verwendet werden kann, in den Greifer des Cobots einzuspannen.
In der Mitte der Darstellung bildet sich zu guter Letzt ein kleiner Bereich, in welchem sich Applikationen befinden, die alle Bereiche miteinander vereinen. Dies wäre der Fall, wenn mehrere Werkzeuge am Roboter montiert werden, welche durch ein Wechselsystem ausgetauscht werden können. Dadurch kann ein einziger Cobot sequentiell verschiedenste Tätigkeiten vollbringen.
Unsere Expertinnen und Experten bei SCHMACHTL freuen sich, Sie bei Ihrer Cobot Applikation zu unterstützen.
